Твой первый квадрокоптер: теория и практика [В С Яценко] (fb2) читать постранично, страница - 4
- Твой первый квадрокоптер: теория и практика (и.с. Электроника) 3.88 Мб, 275с. скачать: (fb2) - (исправленную) читать: (полностью) - (постранично) - В. С. Яценко
[Настройки текста] [Cбросить фильтры]
останется меньший динамический запас оборотов и мощности, чтобы отработать "команды" полетного контроллера на компенсацию порывов ветра или управляющие сигналы с пульта. В результате появится некомпенсированное отклонение от горизонтали и квадрокоптер начнет дрейфовать в сторону смещенного центра тяжести. Подготовленные пользователи могут применить специальные настройки программы контроллера для компенсации негативного эффекта от смещенного центра тяжести, но в общем случае асимметрии следует избегать.
Даже если рама полностью симметрична, у квадрокоптера всегда есть условное направление "вперед", в котором он по умолчанию полетит при отклонении рукоятки пульта по оси Pitch вперед. Это направление привязано к полетному контроллеру, который монтируется на раме в строго определенном положении.
Рама может быть как со складными, так и с фиксированными лучами. На летные качества это не влияет, при выборе конструкции нужно исходить из соображений простоты изготовления, стоимости, удобства транспортировки, при условии соблюдения достаточной прочности. Рамы миниатюрных "наладонных" квадрокоптеров иногда представляют собой единое целое с печатной платой полетного контроллера и целиком изготавливаются из текстолита.
Поскольку в случае квадрокоптеров аэродинамика корпуса или рамы не имеет значения, на первый план выходят противоречивые требования минимального веса и максимальной прочности. Наиболее прочными и легкими являются цельноформованные пустотелые рамы из карбона, так называемые "скорлупки" или "корки", но они и самые дорогие. На втором месте рамы, детали которых изготовлены из листового карбона и карбоновых трубок. Далее идут рамы из всевозможных сочетаний различных материалов, включая сосновые рейки и фанеру. Обсуждению конструкционных материалов будет посвящен отдельный раздел, а сейчас настало время поговорить про "мозг" квадрокоптера.
Зачем вообще нужен специальный полетный контроллер — вычислительная система, работающая в реальном времени по довольно сложным алгоритмам? Очевидно, что квадрокоптер необходимо непрерывно стабилизировать, парируя порывы ветра и неоднородность воздушных масс, а возможностей человеческого организма для этого недостаточно. Современный полетный контроллер оснащен набором миниатюрных интегральных сенсоров, непрерывно отслеживающих положение рамы в пространстве, воздействующие на нее угловые ускорения, атмосферное давление и направление силовых линий магнитного поля. Классическим устройством для стабилизации объекта в пространстве либо измерения угловых ускорений является гироскоп. Все мы из школьных уроков физики знаем про механический гироскоп-волчок либо про вращающийся в свободном подвесе маховик. При попытке изменить угловое положение оси вращающегося маховика возникает противодействующая сила. В трехмерном пространстве произвольное изменение положения рамы квадрокоптера можно разложить на вращение по трем взаимно ортогональным осям. Соответственно, возникают мгновенные угловые ускорения по каждой из этих осей. Эти ускорения могут быть измерены я использованы для выработки компенсирующей реакции в системе с обратной связью, которой в нашем случае является квадрокоптер, оснащенный полетным контроллером. Современные датчики положения и ускорений представляют собой интегральные микросхемы размерами в несколько миллиметров. Внутри у них находится сложная электромеханическая структура из упругих подвесов, грузиков, пружин, конденсаторов и электронной части для усиления и обработки сигналов. Такие устройства принято обозначать аббревиатурой МЭМС (MEMS — MicroElectroMechanical System).
Принцип работы интегрального гироскопа Чувствительным элементом интегрального гироскопа обычно являются два миниатюрных грузика, колеблющихся на упругом подвесе в противоположных направлениях (рис. 2.2).
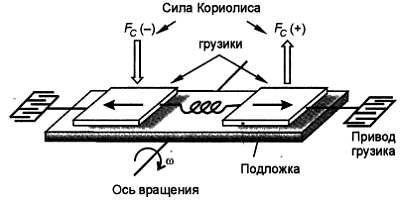
Рис. 2.2. Устройство интегрального гироскопа
Источником колебаний грузиков являются гребенчатые электростатические двигатели. Грузики, вместе с электродами, расположенными на подложке, образуют конденсаторы, входящие в состав дифференциальной схемы, вырабатывающей сигнал, пропорциональный разности емкостей конденсаторов. Линейное ускорение одинаково воздействует на оба грузика и подложку, поэтому сигнал на выходе дифференциальной схемы не появляется. Когда возникает вращательное ускорение по оси со, то на грузики начинает действовать сила Кориолиса FC, отклоняя грузики в противоположных направлениях. Соответственно, емкость одного конденсатора увеличивается, а другого уменьшается, что порождает разностный сигнал, пропорциональный величине углового ускорения. Изначально, при включении, разностный сигнал на выходе
Полетный контроллер
Зачем вообще нужен специальный полетный контроллер — вычислительная система, работающая в реальном времени по довольно сложным алгоритмам? Очевидно, что квадрокоптер необходимо непрерывно стабилизировать, парируя порывы ветра и неоднородность воздушных масс, а возможностей человеческого организма для этого недостаточно. Современный полетный контроллер оснащен набором миниатюрных интегральных сенсоров, непрерывно отслеживающих положение рамы в пространстве, воздействующие на нее угловые ускорения, атмосферное давление и направление силовых линий магнитного поля. Классическим устройством для стабилизации объекта в пространстве либо измерения угловых ускорений является гироскоп. Все мы из школьных уроков физики знаем про механический гироскоп-волчок либо про вращающийся в свободном подвесе маховик. При попытке изменить угловое положение оси вращающегося маховика возникает противодействующая сила. В трехмерном пространстве произвольное изменение положения рамы квадрокоптера можно разложить на вращение по трем взаимно ортогональным осям. Соответственно, возникают мгновенные угловые ускорения по каждой из этих осей. Эти ускорения могут быть измерены я использованы для выработки компенсирующей реакции в системе с обратной связью, которой в нашем случае является квадрокоптер, оснащенный полетным контроллером. Современные датчики положения и ускорений представляют собой интегральные микросхемы размерами в несколько миллиметров. Внутри у них находится сложная электромеханическая структура из упругих подвесов, грузиков, пружин, конденсаторов и электронной части для усиления и обработки сигналов. Такие устройства принято обозначать аббревиатурой МЭМС (MEMS — MicroElectroMechanical System).
Принцип работы интегрального гироскопа Чувствительным элементом интегрального гироскопа обычно являются два миниатюрных грузика, колеблющихся на упругом подвесе в противоположных направлениях (рис. 2.2).
Рис. 2.2. Устройство интегрального гироскопа
Источником колебаний грузиков являются гребенчатые электростатические двигатели. Грузики, вместе с электродами, расположенными на подложке, образуют конденсаторы, входящие в состав дифференциальной схемы, вырабатывающей сигнал, пропорциональный разности емкостей конденсаторов. Линейное ускорение одинаково воздействует на оба грузика и подложку, поэтому сигнал на выходе дифференциальной схемы не появляется. Когда возникает вращательное ускорение по оси со, то на грузики начинает действовать сила Кориолиса FC, отклоняя грузики в противоположных направлениях. Соответственно, емкость одного конденсатора увеличивается, а другого уменьшается, что порождает разностный сигнал, пропорциональный величине углового ускорения. Изначально, при включении, разностный сигнал на выходе
Последние комментарии
19 часов 3 минут назад
19 часов 17 минут назад
20 часов 25 минут назад
1 день 7 часов назад
1 день 8 часов назад
1 день 8 часов назад